激光系统的设计者可以将光束定位到一个大的指定范围或位置,因此可以解决各种不同的应用需求。本位将为大家介绍一个下二维和三维扫描头的特性。
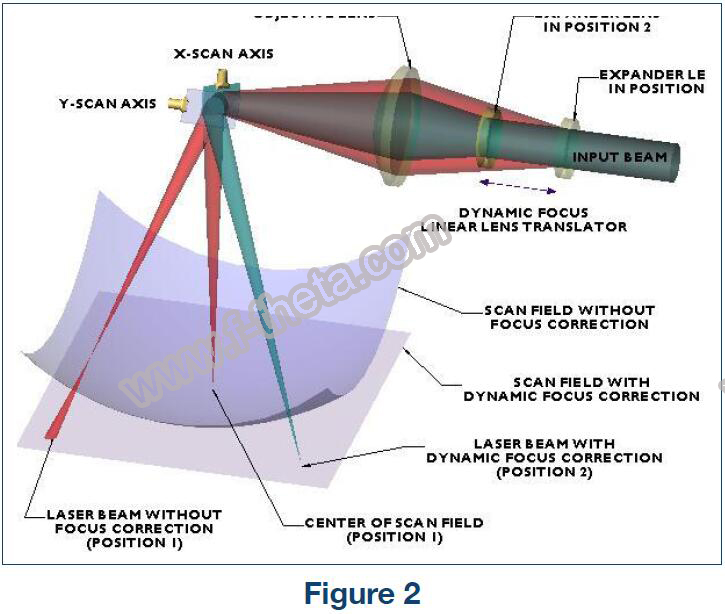
在典型的二维扫描系统中,激光被准直以后经过X和Y轴的反射后进入聚焦透镜。光束将被聚焦镜头聚焦在工作平面上。
X和Y轴的旋转,使得激光在聚焦平面内移动。激光聚焦光斑的大小有聚焦透镜决定,这个透镜也就是我们通常称之为场镜的F-THETA扫描透镜。
本站为大家提供的就是www.f-theta.com 扫描透镜产品,更多产品信息,http://www.f-theta.com/cn/products-cn.html
这种系统称之为激光扫描系统,因为光束在进入镜头前需要被反射镜扫描。
在激光振镜扫描系统中,光束的直径越大,聚焦后的光斑就越小。通常情况下,10mm或14mm入射直径都是常用的情况。
随着扫描范围的增加,激光扫描振镜的尺寸要求也相应增大,光束的直径也增大,这样才能保证较大的NA,由此光束可以获得更小的衍射极限,从而获得小光斑聚焦。当然,由此产生的F-theta扫描场镜的制造成本也相应增加。
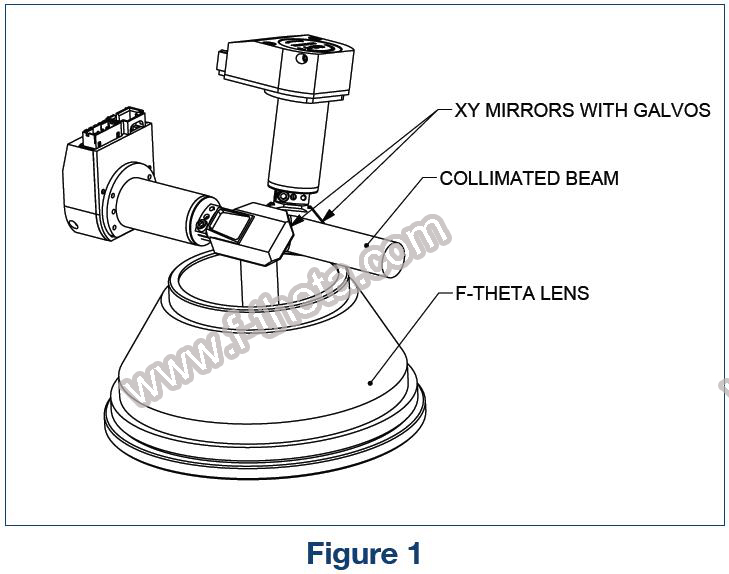
针对以上这种情况,可以考虑使用三维扫描系统的解决方案,这是XY二维扫描振镜定位在聚焦镜后面,因为光束并不需要在镜头上移动,因此F-theta透镜不需要太大。当然这种情况无法获得平场效果。
如果要获得平场,第三个方向Z轴就需要进行线性的移动。
典型的激光系统采用伽利略望远镜的形式,来获得需要的光学系统NA. 在入射镜片和聚焦物镜之间的距离决定了系统的焦距。通过改变入射镜片,我们就能够决定聚焦的位置,如下图所示。
通过三维的调节,最终可以获得平场的效果。